UPDATE FOR ROBOTICS 08/26/2024
About the Robotics Lab :
A robotic arm is a type of mechanical arm, usually programmable, with similar functions to a human arm; the arm may be the sum total of the mechanism or may be part of a more complex robot. The links of such a manipulator are connected by joints allowing either rotational motion (such as in an articulated robot) or transnational (linear) displacement. The links of the manipulator can be considered to form a kinematic chain. The terminus of the kinematic chain of the manipulator is called the end effector and it is analogous to the human hand. The Robotics Lab is available only to students and faculty in the Architecture program.
Robotics Lab Hours:
Sunday - Thursday: 9am - 10pm
Friday - Saturday: 9am - 8pm
The Robotics Lab is by appointment only - Please sign up using the “Submit for Robotic Time!” button below.
ROBOTICS PROTOCOLS FOR USE
The Robotics Lab is available only to students and faculty in the Architecture program. Students in a course with robotic time must undergo an orientation to the lab - covering the proper safety protocols and procedures for use of the Lab. Students will never engage with the robot directly; only the lab monitor is permitted to operate the machine.
The Robotics Lab primarily creates code through PowerMill and Grasshopper plugin “Robots”. Each has their strong suit in terms of outcome. Please consult the Robotics Lab in order to determine what best suits your process.
SUBMISSIONS + QUEUE
You must submit to the Robotics Lab before arriving to the shop! You will be prompted when it is your time for the Robot.
Robotics TUTORIALS + BASE FILES
UPDATE FOR ROBOTICS 08/26/2024
The Robotics Lab has put together a variety of documents to aid you in your fabrication. In order to use the shop, you must be complete your files to the best of your ability and complete the digital submission form. Please reach out to the Robotics monitors or Greg Sheward if you have any questions about file preparation along the way. For Robotic milling, there is an Orientation process similar to the CNC Lab. The 5-Axis Milling Orientation is a basic introductory tutorial mean to ease you into everyday operations you may use on the machine. We have supplied Rhino 6 base model and a step-by-step PDF document for you to follow along with. In addition to these files, we have now added a base introduction tutorials on Grasshopper + Robots. These tutorials will walk you through an array of tasks using the robotic arms at Pratt SoA, such as 2-D Robotic Drawing, Robotic Hot-wire cutting and Robotic 3D Printing.
Grasshopper and Robots reference information we have modeled as accurately as possible using the robot. You can download a 3DM model of the Pi-FAB Robotics Lab above. Each Robotic Zone has a 3D model representation of the setup that is accurately calibrated to the real world setup used by the robot. Please ensure any additions for class specific work is very accurately measure and calibrated in coordination with the robotics staff.
MACHINE INFORMATION

ABB IRB 2600 w/ IRC5 CONTROLLER
Machine Description Here:
“The IRB 2600 is the second model in the sharp generation range with enhanced and new capabilities. It is a compact robot with a high payload capacity. The design has been optimized for targeted applications like arc welding, material handling and machine tending.”
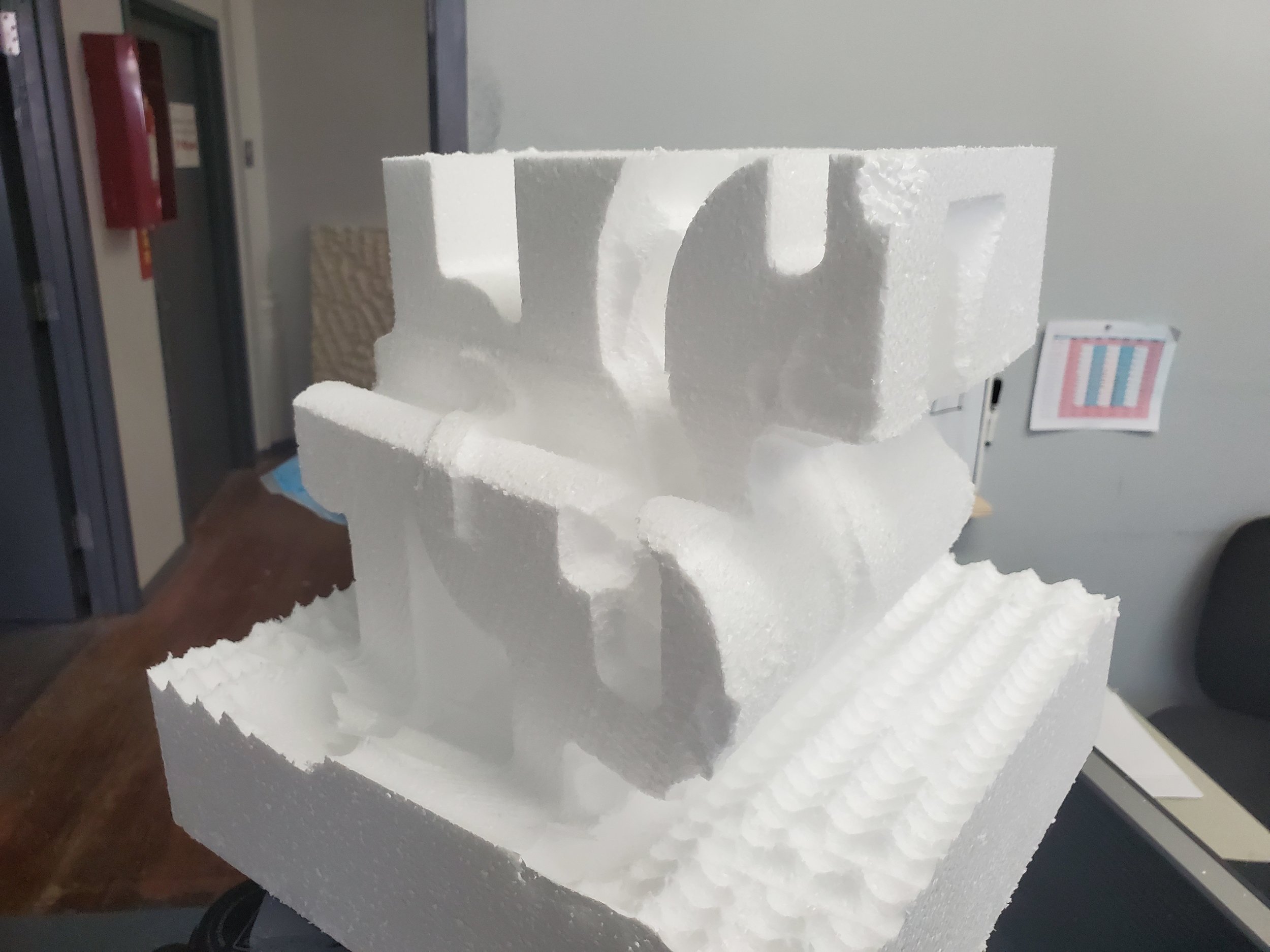
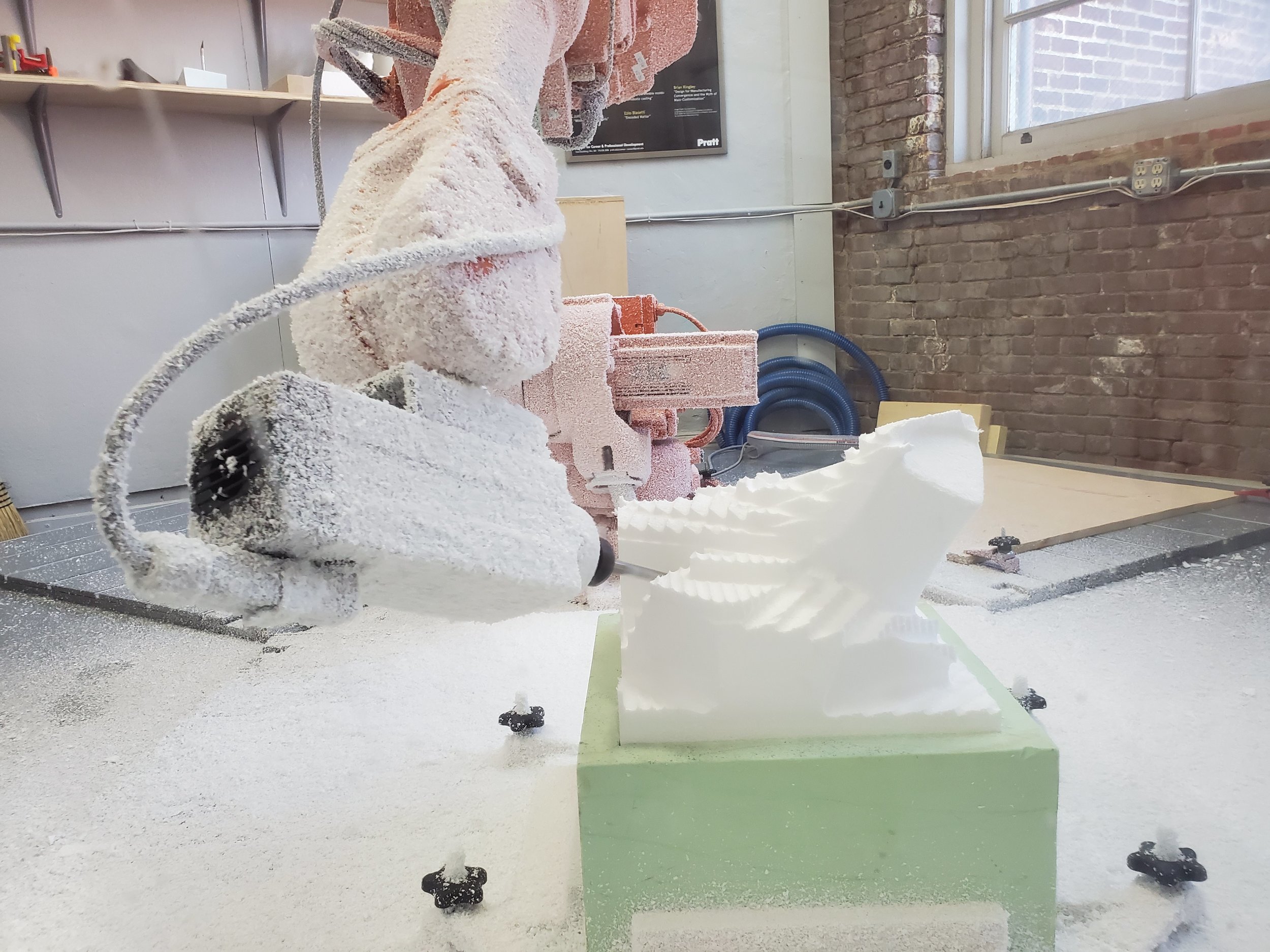
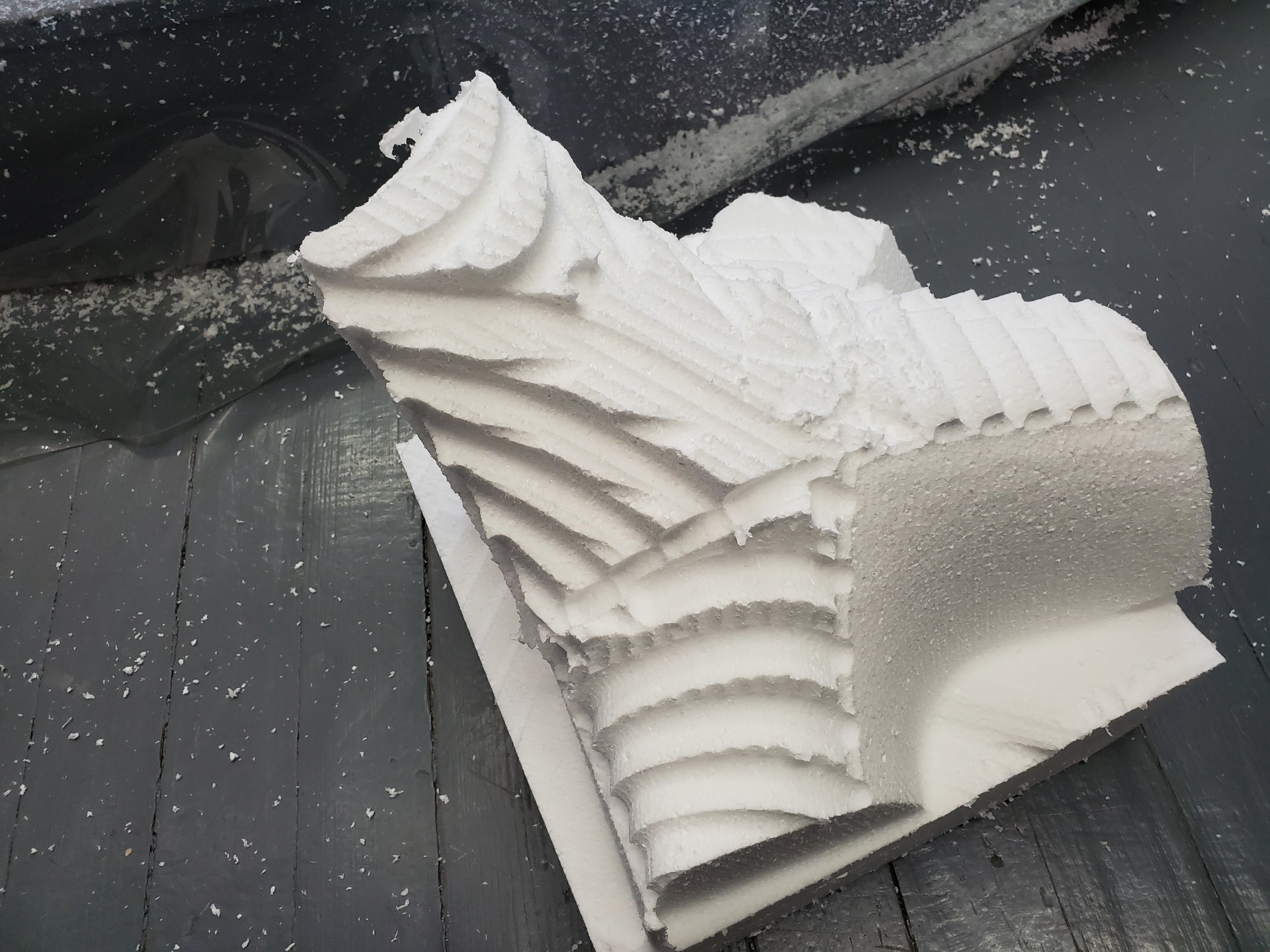
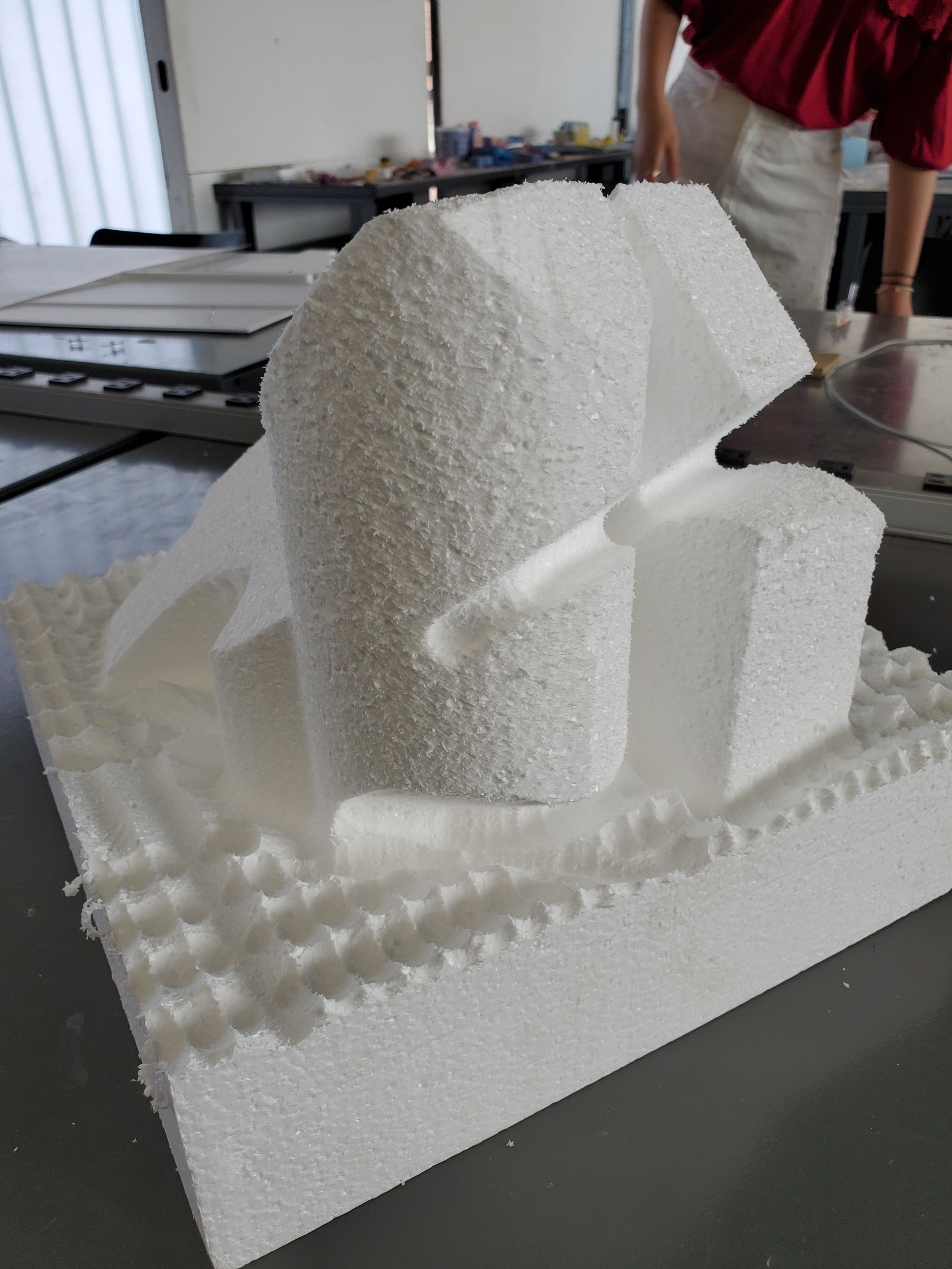
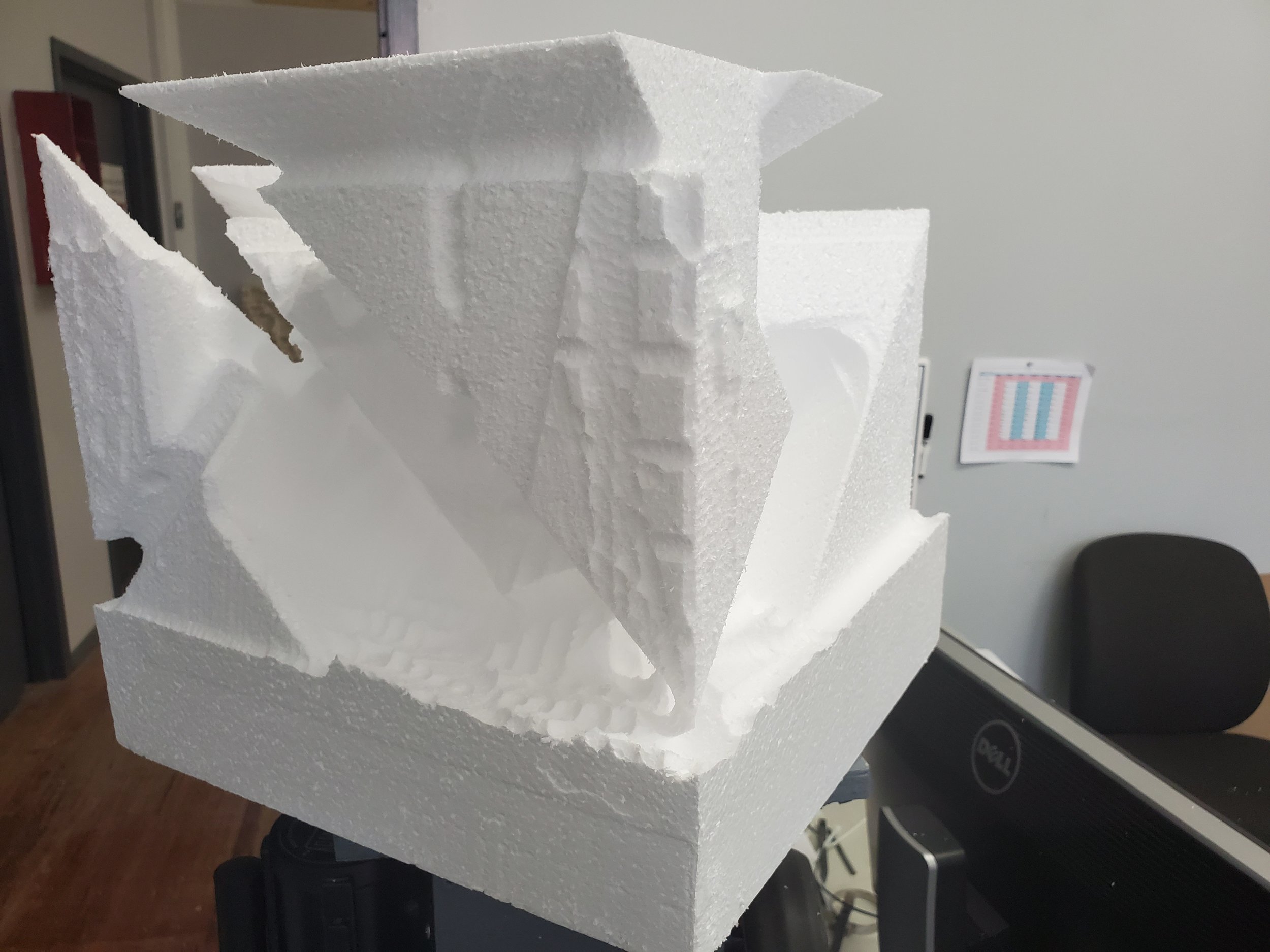
The 2600 is the largest robot in the Architecture Production Facilities. The workzone of the robot is indicated by the circular platform where the robot is installed on a 600mm elevated pedestal. The workzone contains 3 sub-zones: a milling zone, a 3D-Printing zone, and a flexible zone, currently set up for Robotic Hot-Wire cutting.
Machine Size:
Reach: 1650 mm
Payload : 20 kg
ABB IRB 140 w/ IRC5 COMPACT CONTROLLER
Machine Description Here:
“Small, powerful, and fast 6-axes robot. Compact and very powerful. The IRB 140 six axes multipurpose industrial robot handles a payload of 6 kg with a reach of 810 mm (to axis 5) It can be floor mounted, inverted or wall mounted at any angle. The robust design with fully integrated cables adds to the overall flexibility and the collision detection function ensures the robot is reliable and safe.”
The IRB 140 is the smallest robot in the Architecture Production Facilities. The IRB 140 is mounted to a moveable table with a T-slot table top for anchoring fixtures.
Machine Size:
Reach: 810 mm
Payload : 6 kg

ADDITIONAL RESOURCES